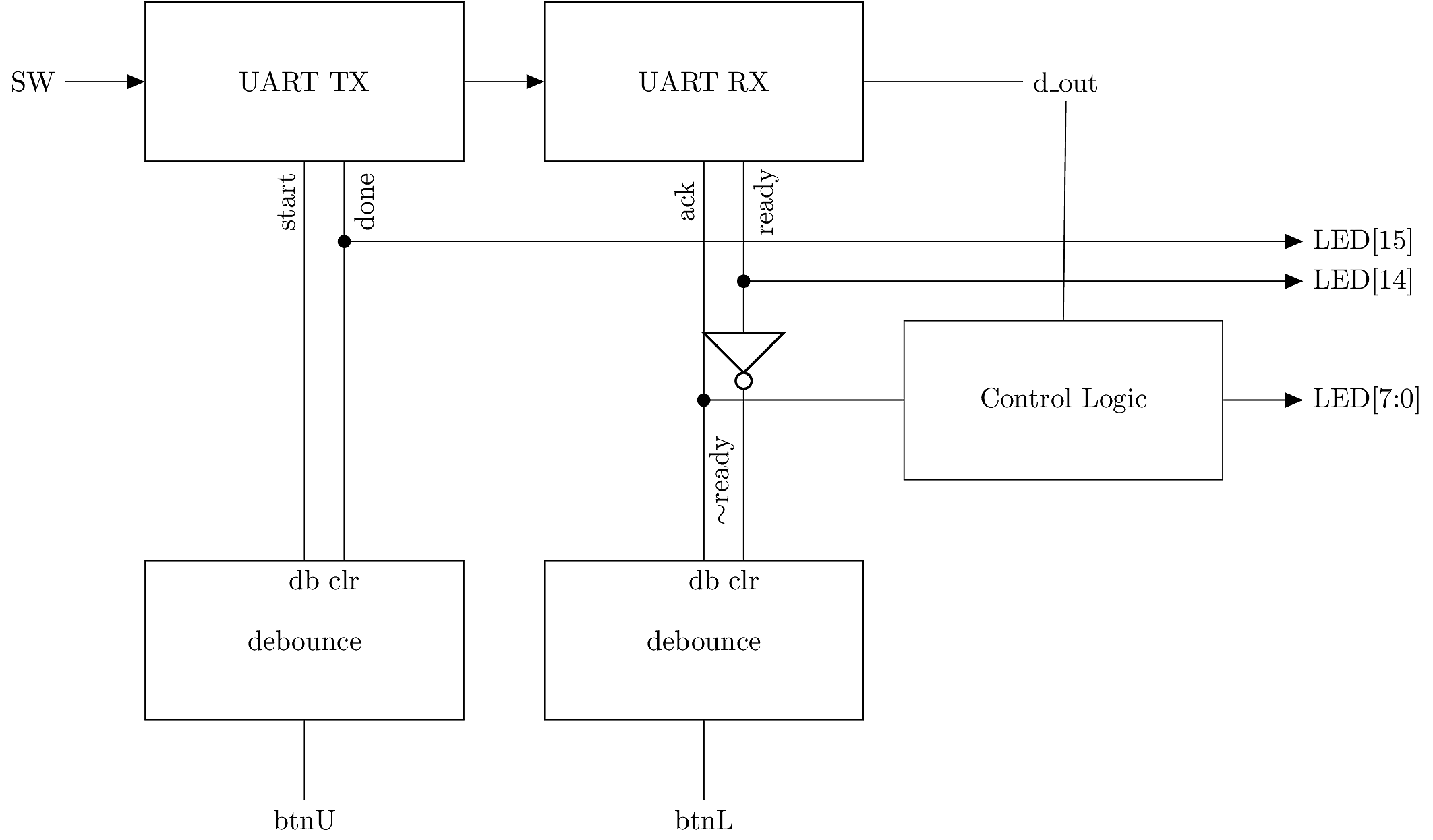
top module.Our top-level design task is to create an internal UART link, consisting of a TX module and an RX module, to transmit data from the Basys3 switches and display the data on the LEDs. The user provides handshaking by pressing buttons. BtnU initiates the start signal, and BtnL gives the acknowledge or ack to complete the transaction and update the LEDs.
A block diagram is shown below.
Here are some of the main features:
UART_TX module’s tx output is connected to the rx input of the UART_RX module.start and ack buttons.ready signal is inverted to clear the ack debouncer, so the handshake sequence is:
rxready goes HIGHack buttonready goes LOW and debouncer is cleared (reset).done and ack are displayed on the higher LEDs. Output data is displayed on the lower LEDs.ack is HIGH, d_out is written onto the lower LEDs.button_pusher Test ModuleSince this design requires a human user to press the start and ack buttons, the testbench should account for the random timing of button-push events, and should also simulate “bounce” events associated with button pushing. To this end, a button_pusher module is provided in the demos/ directory. The button_pusher simulates the random pressing of buttons.
The button_pusher interface is:
module button_pusher #(
parameter Nbtn=5
)
(
input clk,
output reg [Nbtn-1:0] btn
);The button_pusher module uses a parameter, Nbtn, to specify the number of buttons used in the design (default is all five buttons). The module’s output is a vector indicating which buttons are pressed. If a button is pressed, the corresponding bit of btn is 1, otherwise the bit is 0. The simulated user pushes one button at a time. Button presses and releases occur at random. Buttons may bounce (toggle briefly between 1 and 0) when changing between pressed and released states.
When running the test_button_pusher.v simulation (also in demos/) you see a log of button events like this:
btn 2 ON
(bounce)
btn 2 ON
2652: btn = 00100
(bounce)
2654: btn = 00000
btn 2 ON
2655: btn = 00100
btn 2 OFF
3272: btn = 00000
(bounce)
3273: btn = 00100
3274: btn = 00000
(bounce)
3278: btn = 00100
(bounce)
3280: btn = 00000
(bounce)
3281: btn = 00100
(bounce)
(bounce)
3284: btn = 00000
(bounce)
3289: btn = 00100
3290: btn = 00000
(bounce)
3291: btn = 00100
3292: btn = 00000
btn 4 ON
5252: btn = 10000
(bounce)
5254: btn = 00000The indented lines show the clock count and the value of btn. There are short intervals between bounce events, and long intervals between ON/OFF events.
Debugging a system design can be difficult, since problems can be hidden down multiple layers of hierarchy. One way to improve design transparency is to insert $display or $write statements within your UART_TX and UART_RX modules, so that you get some feedback when key events occur. A good place to put these is in state transitions, or when transmitting/receiving a bit. Here are some examples:
// in UART_TX module:
case (state)
WAIT:
begin
if (start) begin
bit_index <= 0; // start at LSB
tx <= 0; // start bit
state <= SEND;
$display(" ++TX: Starting %hh",d_out);
end
else begin
tx <= 1; // idle signal
done <= 0; // not done, ready for data
end
endThe above example prints out a message when the TX module starts a transmission. The message also indicates the data to be transmitted.
// in UART_RX module:
WAIT:
begin
if (!rx) begin
bit_index <= 0; // start at LSB
state <= RECV;
$display(" -- RX: start bit detected");
end
endThe above example prints out a message when the RX module sees the start bit. This indicates that the TX and RX modules are both engaged in communication.
// In the RX module:
RECV:
begin
d_in[bit_index] <= rx;
$write(">%b ",rx);
if (bit_index == 7) begin
state <= STOP;
$display(" -- RX: checking for STOP bit");
end
else begin
bit_index <= bit_index + 1;
end
endThe above example prints out each bit as it is received. Once all the bits are received, it prints a message indicating that it will check for the STOP bit.
// In the TX module:
STOP:
begin
if (start) begin
done <= 1; // Signal that the transmission is complete
tx <= 1; // Stop bit
end
else begin
done <= 0;
state <= WAIT;
$display(" ++TX: Completed.");
end
endThe above example prints out a message when the TX module is finished. Similarly, the RX module can announce when it’s wrapping up:
// In the RX module:
STOP:
begin
if (!ready && rx) begin
$display(" -- RX: data %hh ready, waiting for ack", d_in);
ready <= 1; // Signal that the transmission is complete
end
else if (ack && ready) begin
$display(" --RX: completed with %hh", d_in);
ready <= 0;
state <= WAIT;
end
endThe above example prints out a message when the STOP bit is detected (i.e. when rx goes HIGH to terminate the transaction). It prints another message when the ack signal is detected, indicating that the transaction is completed.
With these messages printed by the TX and RX state machines, the console produces information like this:
++TX: Starting 24h
-- RX: start bit detected
>0 >0 >1 >0 >0 >1 >0 >0 -- RX: checking for STOP bit
-- RX: data 24h ready, waiting for ack
++TX: Completed.This information is detailed enough to verify that the TX and RX state machines are not stuck, that the UART transmission is initiated and detected, the individual bit values are correct, and the transaction is properly concluded.
sync ProcessIn the UART_RX module, it’s necessary to have a synchronization process so that the receiver state machine is
in-phase with the UART data. This can be done using a synchronizing clock divider:
module clock_divider
#(
parameter N=5208
)
(
input clk,
input rst_n,
input sync,
output reg div_clk
);
integer clk_count;
initial begin
div_clk = 0;
clk_count = 0;
end
always @(posedge clk, negedge rst_n) begin
if (!rst_n) begin
div_clk <= 0;
clk_count <= 0;
end
else begin
if (sync) begin
div_clk <= 0;
clk_count <= N;
end
else if (clk_count == N) begin
div_clk <= ~div_clk;
clk_count <= 0;
end
else begin
clk_count <= clk_count + 1;
end
end
end
endmodule // clock_dividerThe above clock divider relies on a sync signal that must be generate from the uart_rx module. Here is an example process for generating the sync signal:
//-----------------------------------------
// sync process
//-----------------------------------------
reg rx_d;
reg rx_negedge;
always @(posedge clk, negedge rst_n) begin
if (!rst_n) begin
sync <= 0;
rx_d <= 1;
rx_negedge <= 0;
end
else begin
rx_d <= rx;
rx_negedge <= rx_d & ~rx;
if ((state == WAIT) && rx_negedge)
sync <= 1;
else
sync <= 0;
end
end
//----------------------------------------The same clock divider can be used in the UART_TX module, without the sync signal, like this:
clock_divider #(.N(N)) CD (clk, rst_n, 1'b0, uclk); // sync disable for TX moduleFor simulation purposes, it is not always necessary to simulate 9600 baud. We can speed-up the UART interface using a top-level parameter, like this:
module top #(
parameter N=5208
)
(
input clk,
input rst,
input start_btn,
input ack_btn,
input [7:0] sw,
output reg [7:0] led
);Within the top module, the parameter must be passed down to the uart_tx and uart_rx modules:
uart_tx #(.N(N)) TX1
(
.clk(clk),
.rst_n(rst_n),
.start(start),
.d_out(sw),
.tx(txrx),
.done(done)
);
uart_rx #(.N(N)) RX1
(
.clk(clk),
.rst_n(rst_n),
.d_in(d),
.rx(txrx),
.ready(ready),
.ack(ack)
);Within the TX and RX modules, the parameter N must be similarly declared, and must be passed along to the clock divider(s) used in those modules. For the RX module:
module uart_rx #(
parameter N=5208
)
(
input clk,
input rst_n,
output reg [7:0] d_in,
input rx,
output reg ready,
input ack
);
reg sync; // Sync signal for clock divider
wire uclk; // UART clock (clock divider output)
clock_divider #(.N(N)) CD (clk, rst_n, sync, uclk);To transmit data at 9600 baud, the default value is N=5208. But for simulation, we could set it to something smaller like 10. The testbench instantiation can indicate the altered parameter value:
top #(.N(10)) DUT (
.clk(clk),
.rst(rst),
.start_btn(start_btn),
.ack_btn(ack_btn),
.sw(sw),
.led(led)
);The testbench should:
top modulebutton_pusher module with parameter Nbtn=2.start and the other button to ack.Here is an example showing how to use the button_pusher:
wire start_btn;
wire ack_btn;
wire [1:0] btn;
button_pusher #(.Nbtn(2)) BTNPUSH
(.clk(clk), .btn(btn));
assign start_btn = btn[0];
assign ack_btn = btn[1];To detect when the LEDs change, we can use a delay register like this:
reg [7:0] led_D;
reg [7:0] sw_D;
always @(posedge clk) begin
rst <= 0;
// Detect changes in input/output signals
led_D <= led;
sw_D <= sw;
if (led_D != led) begin
sw <= $random();
$display("========= LED Change ===========\n %b\n====================",led);
end
if (sw_D != sw) begin
$display("========= Switch Change ========\n %b\n===================",sw);
end
endIn this example, a delay register is also used for sw to report the new switch values. With these elements combined, you should see an output from test_top like this:
btn 0 ON
(bounce)
btn 0 ON
(bounce)
btn 0 ON
++TX: Starting 24h
-- RX: start bit detected
>0 >0 >1 >0 >0 >1 >0 >0 -- RX: checking for STOP bit
-- RX: data 24h ready, waiting for ack
++TX: Completed.
btn 0 OFF
(bounce)
(bounce)
(bounce)
(bounce)
(bounce)
(bounce)
(bounce)
(bounce)
btn 0 ON
(bounce)
btn 0 ON
(bounce)
btn 0 ON
(bounce)
btn 0 ON
(bounce)
btn 0 ON
btn 0 OFF
btn 0 ON
(bounce)
btn 0 ON
btn 0 OFF
btn 1 ON
(bounce)
btn 1 ON
========= LED Change ===========
00100100
====================
========= Switch Change ========
11110010
===================
--RX: completed with 24h
btn 1 OFFSet the testbench stopping condition to large enough value to see several start/ack events, so that the function is verified.